電子制御式差動制限装置:走破性を高める技術

車のことを知りたい
『電子制御式差動制限装置』って、普通の差動制限装置と何が違うんですか?

車の研究家
良い質問だね。普通の差動制限装置は、常に一定の制限がかかっているのに対し、電子制御式はコンピューターで状況に合わせて制限の強さを変えられるんだ。だから、必要な時だけしっかり効いて、不要な時は自由に動けるんだよ。
車のことを知りたい
なるほど。状況に合わせて変えられるんですね。具体的にはどんな時に制限が強くなるんですか?
車の研究家
例えば、雪道でタイヤが空回りしている時などだね。タイヤの回転速度の違いを検知して、空回りしているタイヤにブレーキをかけ、もう片方のタイヤに駆動力を伝えるんだ。そうすることで、車がスタックするのを防ぐんだよ。
電子制御式差動制限装置とは。
車が持つ『電子制御式差動制限装置』について説明します。この装置は、電子の力を使って、車の走る様子に合わせてタイヤの回転の差を調整する仕組みです。四輪駆動車の前の車軸、中央、後ろの車軸にある差動歯車に取り付けられています。回転の差を調整する時は、歯車と歯車を繋ぐ部品(クラッチ)にどれだけの力を伝えるかを電子制御で行います。このクラッチには、油の圧力を使うものや、電磁石を使うものがあります。
この装置は、タイヤの回転差が必要な時と、回転差があると車が走れなくなる時を見分けます。車が走れなくなりそうな時は、クラッチを繋いで走れるようにします。例えば、舗装路で曲がる時はクラッチを離し、タイヤが滑って動力を伝えられない時はクラッチを繋ぎます。タイヤの滑りは、四つのタイヤの回転速度から判断します。タイヤが滑ったのを感知して、差動歯車を固定する仕組みや、アクセルペダルの踏み込み具合から、あらかじめ差動歯車を固定する仕組みなどがあります。
差動制限装置とは

車は曲がる時、外側のタイヤと内側のタイヤでは進む距離が違います。例えば右に曲がるとき、右側の外側のタイヤは左側の内側のタイヤよりも長い距離を進みます。このため、左右のタイヤの回転数に差が生じます。この回転数の差を吸収するのが差動装置です。差動装置がないと、左右どちらかのタイヤが滑ってしまい、スムーズに曲がることができません。
しかし、この差動装置には弱点があります。ぬかるみや雪道など、片方のタイヤが滑りやすい路面で、片輪が空転してしまうと、差動装置は空転しているタイヤに駆動力を集中させてしまいます。これは、空転しているタイヤの抵抗が小さいためです。その結果、グリップしているタイヤには駆動力が伝わらず、車は動けなくなってしまいます。
そこで活躍するのが差動制限装置です。差動制限装置は、左右のタイヤの回転差をある程度まで許容しますが、回転差が大きくなりすぎると、空転しているタイヤへの駆動力の伝達を制限し、グリップしているタイヤにも駆動力を分配します。
差動制限装置には様々な種類があります。例えば、粘性結合を利用した粘性結合式、ギアの噛み合わせを利用した機械式、多板クラッチを用いた多板クラッチ式などがあります。それぞれの方式には特性があり、車種や用途に合わせて最適な方式が選ばれています。
差動制限装置は、滑りやすい路面で威力を発揮するだけでなく、スポーツ走行時にも効果があります。コーナーを速く曲がるためには、タイヤのグリップ力を最大限に活用する必要があります。差動制限装置は、左右のタイヤの回転差を制御することで、タイヤのグリップ力を効率的に路面に伝え、安定したコーナリングを実現します。このように、差動制限装置は車の走行安定性を高める上で重要な役割を担っています。
| 項目 | 説明 |
|---|---|
| 差動装置の役割 | 左右のタイヤの回転数の差を吸収し、スムーズなコーナリングを可能にする。 |
| 差動装置の弱点 | 片輪が空転すると、空転するタイヤに駆動力が集中し、グリップしているタイヤに駆動力が伝わらず車が動けなくなる。 |
| 差動制限装置の役割 | 左右のタイヤの回転差を制限し、空転時にグリップしているタイヤにも駆動力を分配する。 |
| 差動制限装置の種類 | 粘性結合式、機械式、多板クラッチ式など。 |
| 差動制限装置の効果 | 滑りやすい路面での走行安定性向上、スポーツ走行時のコーナリング性能向上。 |
電子制御の仕組み

車は、左右のタイヤの回転速度差を利用してカーブを曲がります。内側のタイヤは回転速度が遅く、外側のタイヤは回転速度が速くなります。この回転速度差を調整するのが差動装置です。
従来の機械式の差動装置は、あらかじめ決められた仕組みで左右のタイヤへの力の配分を調整していました。例えば、片方のタイヤがぬかるみにはまって空転した場合、もう片方のタイヤにも力が伝わらず、車は動けなくなってしまいます。これは、機械式の差動装置が、空転しているタイヤに多くの力を配分してしまうからです。機械式の差動装置は、路面状況の変化に柔軟に対応することが難しいという課題がありました。
電子制御式差動装置は、この課題を解決するために開発されました。様々な装置から得られる情報に基づいて、状況に応じて最適な差動制限を行います。例えば、各タイヤに取り付けられた回転速度を測る装置の情報から、タイヤの空転を感知することができます。また、車の回転速度やハンドル角度を測る装置の情報から、車の旋回状態を把握することもできます。これらの情報を総合的に判断することで、電子制御式差動装置は、非常に細かい制御を実現しています。
路面状況や走行状況に応じて、差動制限の強さを細かく調整できることも大きな利点です。乾燥した舗装路では、差動制限を弱めてスムーズな旋回を可能にします。一方、雪道やぬかるみなど、滑りやすい路面では、差動制限を強めてタイヤの空転を抑え、走破性を高めます。このように、電子制御式差動装置は、様々な状況下で、高い走破性と優れた操縦安定性を両立させることを可能にしています。これにより、ドライバーは安心して運転を楽しむことができるのです。
| 項目 | 機械式差動装置 | 電子制御式差動装置 |
|---|---|---|
| 力の配分 | あらかじめ決められた仕組み | 様々な装置から得られる情報に基づき、状況に応じて最適な配分 |
| 空転時の対応 | 空転側のタイヤに多くの力が配分され、もう片方のタイヤに力が伝わらず動けなくなる | タイヤの空転を感知し、適切な差動制限を行う |
| 路面状況への対応 | 難しい | 路面状況や走行状況に応じて、差動制限の強さを細かく調整可能 |
| 制御 | – | 非常に細かい制御を実現 |
| 走破性と操縦安定性 | – | 高い走破性と優れた操縦安定性を両立 |
油圧と電磁による制御方式

車の動きを巧みに操る差動制限装置には、油圧を使う方式と電磁石を使う方式の二種類があります。
油圧を使う方式では、油の力を利用した握り合わせ機が重要な役割を担います。電子制御装置からの指示で油の流れ具合が変わり、握り合わせ機の握る力が調整されます。これにより、左右の車輪の回転差を少なくする力の強さを細かく変えることができます。この方式は、構造が単純で壊れにくいという利点があります。しかし、油を使うためどうしても反応速度が遅く、精密な制御は難しいという面もあります。
一方、電磁石を使う方式では、電磁石の力を利用した握り合わせ機が使われます。電流の強さを変えることで、握り合わせ機の握る力を調整し、左右の車輪の回転差を少なくする力の強さを変えます。電気を利用するため、油圧方式に比べて反応速度が速く、より精密な制御が可能です。そのため、急なハンドル操作や滑りやすい路面でも、車の安定性を保つのに役立ちます。しかし、油圧方式に比べると構造が複雑になりがちで、製造費用も高くなる傾向があります。
このように、それぞれの方式には得手不得手があります。そのため、車の種類や用途、価格帯などを考慮して、最適な方式が選ばれています。例えば、一般の乗用車では油圧方式が多く採用されていますが、高性能なスポーツカーなどでは、より精密な制御が可能な電磁石方式が採用されることが多いです。このように、技術の進歩に合わせて、様々な制御方式が開発され、私たちの快適な運転を支えています。
| 項目 | 油圧式 | 電磁式 |
|---|---|---|
| 駆動方式 | 油圧 | 電磁石 |
| 制御機構 | 油の流れ具合で握り合わせ機の握る力を調整 | 電流の強さで握り合わせ機の握る力を調整 |
| 長所 | 構造が単純で壊れにくい | 反応速度が速く、精密な制御が可能、車の安定性向上 |
| 短所 | 反応速度が遅く、精密な制御が難しい | 構造が複雑になりがちで、製造費用も高くなる |
| 採用例 | 一般の乗用車 | 高性能なスポーツカー |
様々な制御方法

車の動きを巧みに操る差動制限装置には、様々な制御方法が用いられています。大きく分けて、二つの制御方法が活躍しています。一つは、実際に起きた状態に応じて制御を行う「後戻し制御」です。もう一つは、これから起こる状態を予測して制御を行う「先読み制御」です。
後戻し制御は、車輪の回転速度を測る装置などから得られたタイヤの回転数の情報をもとに、差動制限を行います。タイヤが空転し始めたことを検知してから作動するため、反応速度は少し遅くなります。しかし、実際に起きている状態を把握してから制御を行うため、確実な差動制限効果を発揮します。例えば、ぬかるんだ道で片方のタイヤが空転し始めた場合、後戻し制御は、その空転を素早く検知し、もう片方のタイヤに駆動力を分配することで、車が前に進めるようにします。
一方、先読み制御は、アクセルの踏み込み量やハンドルの角度といった情報から、タイヤが空転する可能性を予測して、あらかじめ差動制限を行います。反応速度は速いという利点がありますが、予測が外れてしまうと適切な制御ができない可能性も秘めています。例えば、カーブに差し掛かる前に、ハンドルの角度やアクセルの踏み込み量からタイヤの空転を予測し、あらかじめ駆動力を適切に配分することで、スムーズなコーナリングを実現します。しかし、路面の状況が予測と異なっていた場合、適切な制御ができずに、思った通りの走行ができないこともあります。
最近では、これら二つの制御方法を組み合わせることで、より高度な制御を実現しています。後戻し制御の確実さと先読み制御の速さを組み合わせることで、様々な路面状況や運転状況に最適な差動制限を行い、安全で快適な運転を支援しています。
| 制御方法 | 概要 | メリット | デメリット | 例 |
|---|---|---|---|---|
| 後戻し制御 | 車輪の回転速度などの情報から、実際に起きた状態に応じて差動制限を行う。 | 確実な差動制限効果 | 反応速度が少し遅い | ぬかるんだ道で片輪が空転した時、もう片輪に駆動力を分配。 |
| 先読み制御 | アクセルの踏み込み量やハンドルの角度から、これから起こる状態を予測して差動制限を行う。 | 反応速度が速い | 予測が外れると適切な制御ができない | カーブ前にハンドルの角度などから空転を予測し駆動力を配分。路面状況が予測と異なると適切な制御ができない場合も。 |
| 組み合わせ制御 | 後戻し制御と先読み制御を組み合わせた制御。 | 後戻し制御の確実さと先読み制御の速さを両立 | – | 様々な路面状況や運転状況に最適な差動制限を行い、安全で快適な運転を支援。 |
四輪駆動車への応用

四輪駆動車は、前後輪すべてに駆動力を伝えることで、舗装されていない道や雪道など、様々な路面状況で優れた走破性を発揮します。しかし、左右の車輪の回転速度に差が生じる場面では、駆動力が逃げてしまうことがあります。例えば、片側の車輪がぬかるみや雪で空転すると、そちらに駆動力が集中し、もう片方の接地している車輪には駆動力が伝わりにくくなるため、車は前に進みにづらくなります。このような状況で威力を発揮するのが電子制御式差動制限装置です。
電子制御式差動制限装置は、車輪の回転速度の差を感知し、ブレーキをかけることで駆動力の伝達を制御する装置です。従来の機械式の差動制限装置と比べて、より緻密で迅速な制御が可能となります。四輪駆動車においては、前輪の左右、後輪の左右、そして前後輪の間の駆動力配分をそれぞれ制御する差動装置が存在します。
前輪左右の駆動力配分を制御する前輪差動装置に電子制御式差動制限装置を組み込むことで、片側の車輪が空転した場合でも、もう片方の接地している車輪に駆動力を伝え、スムーズな旋回や脱出を可能にします。カーブを曲がる際にも、外側の車輪に適切な駆動力を配分することで、より安定した走行を実現できます。
前後輪の駆動力配分を制御する中央差動装置に電子制御式差動制限装置を搭載すると、路面状況に応じて前後輪への駆動力配分を最適化できます。乾燥した舗装路では後輪寄りに、滑りやすい路面では四輪に均等に、急な坂道では前輪寄りに駆動力を配分することで、安定した走行と力強い走りを両立させることができます。
後輪左右の駆動力配分を制御する後輪差動装置に電子制御式差動制限装置を組み込むことで、発進時や登坂時に駆動輪の空転を抑え、力強い発進と登坂を可能にします。特に、未舗装路や雪道など、滑りやすい路面での発進や登坂において効果を発揮し、スムーズな走行を助けます。このように、電子制御式差動制限装置を各差動装置に搭載することで、四輪駆動車の走破性は飛躍的に向上し、様々な路面状況で安全かつ快適な走行を実現することができるのです。
| 差動装置 | 電子制御式差動制限装置の効果 |
|---|---|
| 前輪差動装置 | 片輪空転時の駆動力確保、スムーズな旋回と脱出、カーブでの安定走行 |
| 中央差動装置 | 路面状況に応じた前後輪駆動力配分の最適化(乾燥路:後輪寄り、滑りやすい路面:四輪均等、急坂:前輪寄り) |
| 後輪差動装置 | 発進時・登坂時の駆動輪空転抑制、力強い発進と登坂、未舗装路や雪道でのスムーズな走行 |
今後の発展

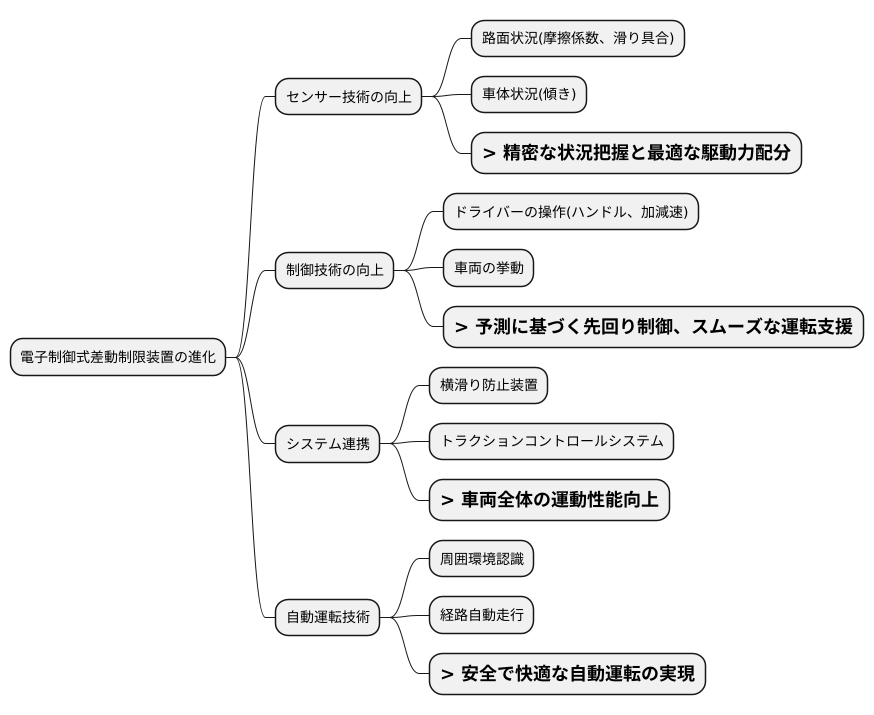
自動車の駆動力を路面に伝える機構は、常に改良が重ねられてきました。中でも、左右の車輪の回転速度差を調整する差動制限装置は、車の走行安定性や旋回性能を向上させる上で重要な役割を担っています。近年の電子制御技術の進歩に伴い、電子制御式差動制限装置は目覚ましい発展を遂げており、今後さらに進化していくと考えられます。
まず、センサー技術の向上により、路面状況や走行状況をより精密に把握できるようになります。路面の摩擦係数や車輪の滑り具合、車体の傾きなどをリアルタイムで検知し、その情報に基づいて差動制限の度合いを細かく調整することが可能になります。これにより、乾燥路、濡れた路面、雪道など、様々な路面状況で最適な駆動力を確保し、安定した走行を実現できるようになります。
さらに、制御技術の向上も大きな進歩をもたらします。より高度な制御アルゴリズムを用いることで、ドライバーの操作や車両の挙動を予測し、先回りして差動制限を制御することが可能になります。急なハンドル操作や加減速時にも、車体の姿勢を安定させ、スムーズな運転を支援します。
また、他の電子制御システムとの連携も進むでしょう。例えば、横滑り防止装置やトラクションコントロールシステムと連携することで、車両全体の運動性能を統合的に制御することが可能になります。これにより、限界走行時における車両の安定性向上や、より高度な運転支援システムの実現が期待されます。
そして、自動運転技術との連携も重要なポイントです。自動運転車は、周囲の環境を認識し、最適な経路を自動で走行しますが、路面状況の変化や予期せぬ事態への対応は依然として課題です。電子制御式差動制限装置は、自動運転車においても重要な役割を果たし、より安全で快適な自動運転の実現に貢献するでしょう。このように、電子制御式差動制限装置は、自動車の進化を支える重要な技術として、今後もさらなる発展を遂げていくと考えられます。