
推測航法:位置を推定する技術

車のことを知りたい
先生、「推測航法」ってどういう意味ですか? GPSみたいなもので位置がわかるんじゃないんですか?

車の研究家
いい質問だね。GPSは人工衛星からの信号を使うけど、トンネルの中とか山の陰ではうまく受信できないことがあるんだ。そんな時に「推測航法」が活躍するんだよ。簡単に言うと、最後にわかった自分の位置から、どっちの方向にどれくらい進んだかを計算して、今の自分の位置を推測する方法なんだ。
車のことを知りたい
なるほど。でも、計算で位置を出すってことは、実際の位置とは少しズレてしまうこともあるんじゃないですか?
車の研究家
その通り! 方向や距離を測るセンサーにも誤差があるから、どうしてもズレは避けられないんだ。そのズレを減らすために、地図の情報と照らし合わせて修正する「マップマッチング」っていう技術も一緒に使われているんだよ。
推測航法とは。
車の位置を知る方法の一つに「推測航法」というものがあります。通常は衛星を使って車の位置を正確に把握していますが、トンネルの中や山の陰などでは衛星からの信号を受信できず、位置が分からなくなることがあります。このような場合に「推測航法」が使われます。最後に衛星で確認できた位置をスタート地点として、車の進んでいる方向と走った距離を記録し続け、現在の位置を計算しながら進んでいく方法です。方向を知るためには、地球の磁気を利用したセンサーや、回転の速さを測るセンサー、左右のタイヤの回転数の違いなどを利用します。距離はタイヤの回転数などを測るセンサーから得られます。しかし、これらのセンサーは完全に正確ではなく、どうしても誤差が生じてしまいます。そのため、推測航法では、走れば走るほど位置の誤差が大きくなっていく傾向があり、一般的には走った距離の2~3%ほどの誤差が生じると言われています。この誤差を少なくするために、地図の情報と照らし合わせながら、車の位置を修正する「マップマッチング」という方法も使われています。
位置把握の重要性

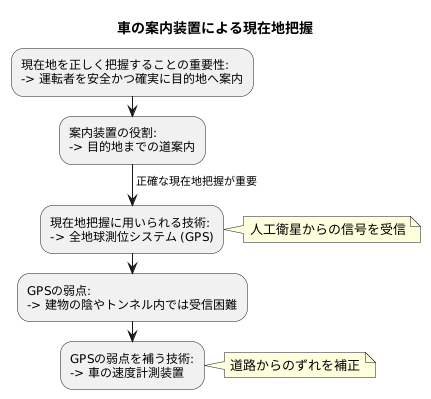
現在地を正しく把握することは、車の案内装置において非常に大切です。地図上における自分の位置が正確にわかれば、目的地までの最適な道筋を計算し、運転する人を安全かつ確実に目的地まで案内することができます。
車の案内装置は、目的地までの道案内をするための装置です。この装置を使うことで、知らない土地でも迷わずに目的地までたどり着くことができます。案内装置の性能は、いかに正確に現在地を把握できるかにかかっています。現在地の把握がずれてしまうと、道案内自体が間違ってしまうからです。
現在地を把握するために、案内装置は様々な技術を使っています。代表的なものに全地球測位システムがあります。これは、地球の周りを回っている複数の人工衛星からの信号を受信することで、現在地を特定する技術です。しかし、人工衛星からの信号は、建物の陰やトンネルの中などでは受信しにくいため、これらの場所では現在地を正しく把握できない場合があります。
このような問題に対処するため、案内装置は全地球測位システム以外にも様々な技術を組み合わせて現在地を把握しています。例えば、車の速度を測る装置や、タイヤの回転数を測る装置の情報を利用することで、全地球測位システムの信号が受信できない場所でも、ある程度の精度で現在地を推定することができます。また、地図情報と照合することで、現在地をより正確に特定することも可能です。例えば、車が道路上を走っていると仮定し、全地球測位システムで得られた位置が道路から外れている場合は、地図情報を使って最も近い道路上に現在地を補正するといった方法が用いられます。
このように、車の案内装置は様々な技術を駆使することで、常に正確な現在地を把握しようと努めています。現在地を正しく把握することは、安全で快適な運転に不可欠であり、案内装置の重要な役割と言えるでしょう。
衛星測位システムの限界

人工衛星を使った位置を知る仕組み(衛星測位システム)は、今や車の位置を知るための主要な方法となっています。高い精度で位置が分かるという大きな利点があり、カーナビゲーションシステムなどで広く使われています。この仕組みは、複数の人工衛星から送られてくる信号を車載の受信機が受け取ることで、現在位置を割り出すというものです。しかし、この仕組みは常に完璧に動作するとは限りません。いくつかの要因によって、人工衛星からの信号が受信できない、あるいは受信できても精度が低下するといった問題が発生する可能性があります。
例えば、トンネルの中や高い建物の谷間、あるいは山の陰などでは、衛星からの信号が遮られてしまうため、位置情報の取得が難しくなります。このような場所では、衛星からの信号が受信機に届きにくいため、現在位置を正確に特定することができません。また、高層ビルが立ち並ぶ都市部では、ビルによって信号が反射したり、電波が乱れたりするため、測位に誤差が生じる場合があります。このような衛星からの信号がうまく受信できない状況では、衛星測位システムだけに頼ったナビゲーションは正常に機能しなくなり、目的地まで正しく案内することができなくなってしまいます。そのため、現在位置が分からなくなったり、엉뚱な道案内をされたりするといった問題が起こる可能性があります。
このような衛星測位システムの限界を克服するために、他の方法と組み合わせることが重要になります。例えば、車速センサーやジャイロセンサー、加速度センサーなどを使って、車の動きを検知し、衛星測位システムの情報が得られない場合でも、ある程度の位置を推定することができます。また、地磁気センサーや道路地図データなども活用することで、より正確な位置情報を取得することが可能になります。 将来的には、より信頼性の高い測位システムの開発が期待されます。様々なセンサーや技術を組み合わせることで、どんな環境でも正確な位置情報を取得できる、より安全で便利なナビゲーションシステムが実現されるでしょう。
| 衛星測位システムの利点 | 衛星測位システムの欠点 | 欠点への対策 |
|---|---|---|
| 高い精度で位置が分かる | トンネル内、高層ビル街、山の陰など、衛星からの信号が受信できない、あるいは受信できても精度が低下する。 | 車速センサー、ジャイロセンサー、加速度センサー、地磁気センサー、道路地図データなどを活用し、衛星測位システムの情報が得られない場合でも位置を推定する。 |
| カーナビゲーションシステムなどで広く使われている。 | 電波の乱れにより測位に誤差が生じる場合がある。 | 様々なセンサーや技術を組み合わせることで、信頼性の高い測位システムを開発。 |
推測航法:GPSの代替手段

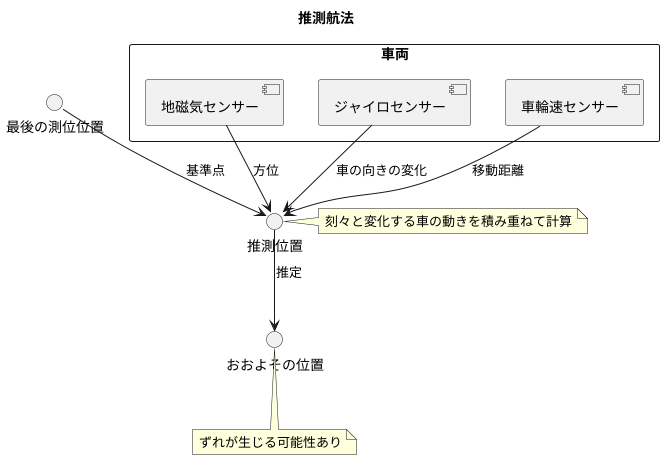
位置を知る手がかりとなる全地球測位網が使えない時でも、自分の場所を推定する方法があります。それが推測航法と呼ばれる技術です。この方法は、最後に測位できた地点を始まりとして、自分の車がどの方向にどれだけの距離を進んだかを基に、今の場所を推測します。
具体的には、車に備え付けられた様々な装置から情報を得て、車の動きを捉えます。方位磁石のような働きをする地磁気センサーは、車がいまどちらの方角を向いているのかを教えてくれます。そして、回転を感知するジャイロセンサーは、車がどのように向きを変えたかを捉えます。さらに、タイヤの回転速度を測る車輪速センサーは、車がどれだけの距離を進んだかを教えてくれます。
これらの装置から得られた情報を組み合わせることで、最後に位置を確認できた地点から、どの方向に、どれだけの距離を進んだかを計算します。例えば、北の方向に100メートル進んだ、次に東の方向に50メートル進んだ、といった具合です。こうして、刻々と変化する車の動きを積み重ねていくことで、現在の位置を推定します。
もちろん、推測航法はあくまで推測なので、実際の位置とのずれが生じる可能性はあります。センサーがわずかな誤差を含んでいることや、道路の傾斜やタイヤの滑りなど、様々な要因が推測の精度に影響を与えます。しかし、全地球測位網の電波が届かないトンネルの中や、高層ビルが立ち並ぶ都市部など、電波を受信しにくい場所では、推測航法が威力を発揮します。たとえ完全な精度でなくても、おおよその位置を把握できることは、道案内の装置の信頼性を高める上で重要な役割を果たします。まさに、見えない場所でも道に迷わないための、心強い味方と言えるでしょう。
推測航法の課題:誤差の蓄積

推測航法は、車などの移動体の現在位置を知るための便利な技術です。出発点の位置情報と、移動距離や方向を基に、刻々と変化する現在位置を計算します。まるで航海中の船が、羅針盤と速度計だけを頼りに位置を推定するように、様々な機械で応用されています。しかし、この推測航法には大きな課題があります。それは、様々な誤差が積み重なっていくことです。
推測航法では、方位を知るために地磁気を感じ取る装置や、回転の向きと速さを測る装置などを用います。また、移動距離を知るために、車輪の回転速度を測る装置なども使います。これらの装置はどれも、ごくわずかな誤差を含んでいます。地磁気を感じ取る装置は、周りの磁気の影響を受けやすく、正確な方位を示せないことがあります。回転の向きと速さを測る装置も、振動などで値がずれてしまうことがあります。車輪の回転速度を測る装置も、タイヤの空気圧や路面の状況によって、実際の移動距離と誤差が生じることがあります。
推測航法では、これらの装置から得られた数値を基に、移動距離や方向を計算し、現在位置を推定します。そのため、装置の誤差が計算結果に影響を与えてしまいます。さらに、誤差は時間とともに積み重なっていきます。例えば、方位が1度ずれていたら、100メートル進むごとに位置が約1.7メートルずれます。もし、10キロメートル進めば、170メートルもずれてしまうことになります。このように、走行距離が長くなるほど、誤差の影響は大きくなり、実際の位置とのずれが大きくなってしまうのです。一般的に、推測航法の測位誤差は、走行距離のおよそ2~3%と言われています。
この誤差の積み重ねは、推測航法の大きな課題であり、より精度の高い位置情報を得るためには、全地球測位システム(GPS)など、他の測位技術と組み合わせることが必要です。推測航法は、他の測位技術が使えない状況でも位置を推定できるという利点があるため、誤差への対策を施しつつ、様々な場面で活用されています。
| 項目 | 内容 |
|---|---|
| 推測航法とは | 出発点の位置情報と、移動距離や方向を基に、刻々と変化する現在位置を計算する航法。 |
| 使用装置例 |
|
| 推測航法の課題 | 誤差の積み重ね |
| 誤差要因 |
|
| 誤差の影響 |
|
| 対策 | GPSなど他の測位技術との併用 |
| 利点 | 他の測位技術が使えない状況でも位置を推定できる。 |
地図情報を活用した補正

現在位置を知るための技術の一つに、移動距離と向きから位置を推定する航法があります。しかし、この方法は移動に伴って誤差が蓄積していくという欠点があります。そこで、地図情報と組み合わせることで、この誤差を小さくする技術が開発されてきました。その代表的なものが、地図合わせです。
地図合わせは、推定航法で得られた位置を、地図にある道路網の情報と照らし合わせ、最も近い道路上に位置を修正する技術です。たとえば、推定航法で計算された位置が道路から大きく外れている場合、地図合わせによって近くの道路上に位置が補正されます。これにより、推定航法の誤差を抑え、より正確な位置情報を得ることが可能になります。
地図合わせを実現するためには、様々な工夫が凝らされています。まず、推定航法の位置と道路網の位置関係を素早く正確に計算する必要があります。膨大な道路データの中から、現在位置に近い道路を効率的に探し出す高度な探索技術が用いられています。また、道路には一方通行や車両通行止めなど、通行に関する様々な規則があります。これらの規則を考慮することで、より現実的な経路探索が可能になります。さらに、GPS信号が遮断されるトンネル内や高層ビル街などでも、地図合わせは有効に機能します。推定航法と地図情報を組み合わせることで、これらの場所でも、ある程度の精度で位置を特定することができるのです。
地図合わせは、推定航法の精度向上に大きく貢献しており、現代の案内システムには欠かせない技術となっています。自動車の案内だけでなく、歩行者向けの案内アプリや、配達物の追跡システムなど、様々な場面で活用されています。今後、自動運転技術の発展に伴い、地図合わせの重要性はさらに高まっていくと考えられます。より精密な地図情報と、高度な位置特定技術の組み合わせが、安全で快適な移動体験を実現する鍵となるでしょう。
| 技術 | 概要 | メリット | 課題と解決策 | 応用例 | 今後の展望 |
|---|---|---|---|---|---|
| 航法 | 移動距離と向きから位置を推定 | – | 誤差が蓄積していく | – | – |
| 地図合わせ | 推定航法で得られた位置を地図情報と照合し、道路上に位置を修正 | 推定航法の誤差を抑制し、正確な位置情報を得られる GPS信号が遮断される場所でも有効 |
これらの課題に対し、高度な探索技術や道路規則を考慮したアルゴリズムが開発されている |
自動車の案内、歩行者向けの案内アプリ、配達物の追跡システム | 自動運転技術の発展に伴い重要性が増す |