
四輪操舵の制御技術

車のことを知りたい
先生、『モデルフォロイング制御方式』って、なんだか難しそうでよくわからないんですけど、簡単に説明してもらえますか?

車の研究家
そうだね、難しく感じるのも無理はないよ。簡単に言うと、ハンドルを切った角度や車の速さから、車がどう動くのが理想かを計算して、後輪の角度を調整するしくみだよ。例えば、カーブを曲がるときに、車がどれくらい傾くか、どれくらいの速さで曲がっていくのが理想かをあらかじめ決めておいて、後輪の向きを変えて、その理想の動きに近づけるんだ。
車のことを知りたい
なるほど。つまり、前もって決めた理想の動きに近づけるように、後ろのタイヤの向きをコンピューターが自動で調整してくれるってことですか?
車の研究家
その通り!より正確に、きめ細かく後ろのタイヤの角度を調整することで、車が線の上をきれいに走れたり、横風などによるふらつきを抑えたりすることができるんだよ。
モデルフォロイング制御方式とは。
日産の電動スーパーハイキャスという4輪操舵システムで使われている、後輪のハンドル操作を制御する技術のひとつ、「モデルフォロイング制御方式」について説明します。この技術は、GT-Rにも搭載されています。ハンドルの角度や車の速度に応じて、車が理想的に動く状態(回転速度や横方向の速度)をあらかじめ決めておき、その状態に近づけるように後輪のハンドル角度を調整します。より細かく正確な制御を行うことで、車の進路が安定し、外からの影響にも強い走りを実現します。
技術の概要

車は、ただ前輪の向きを変えるだけで曲がっているわけではありません。実際には複雑な動きが組み合わさって、滑らかに曲がったり、速く曲がったりすることができるのです。その動きを助ける技術の一つに、後輪の向きも変える四輪操舵という技術があります。日産が開発した電動スーパーハイキャスも、この四輪操舵の一つで、後輪をどのように動かすかを指示する技術にモデル追従制御方式が使われています。
このモデル追従制御方式は、運転手がハンドルをどれくらい切ったか、アクセルをどれくらい踏んでいるか、ブレーキをどれくらい踏んでいるかといった情報を読み取ります。そして、その情報に基づいて、車がどのように動けば理想的なのかを計算します。例えば、カーブを曲がる時に、どれくらいの速さで、どれくらいの角度で曲がればスムーズで安全なのかを計算するのです。
この理想的な動きの指標となるのが、ヨーレートと横速度です。ヨーレートとは、車が回転する速さのことで、横速度とは、車が横に動く速さのことです。モデル追従制御方式は、あらかじめ設定されたこれらの目標値に近づくように、後輪の角度を細かく調整します。
例えば、高速道路で車線変更をする場合、後輪が適切な角度で動くことで、スムーズに車線変更ができます。また、カーブを曲がる際も、後輪が理想的な角度で動くことで、安定した走行が可能になります。この技術は、有名なスポーツカーであるGT-Rにも搭載されており、その高い運動性能に貢献しています。まるで運転手の意図を読み取るように、車が思い通りに動いてくれる感覚は、まさに先進技術の賜物と言えるでしょう。
| 技術名 | 四輪操舵 (例: 電動スーパーハイキャス) |
|---|---|
| 制御方式 | モデル追従制御方式 |
| 入力情報 | ハンドル角度、アクセル開度、ブレーキ踏力 |
| 制御目標 | ヨーレート、横速度 |
| 効果 | スムーズな車線変更、安定したコーナリング |
| 搭載車例 | 日産 GT-R |
制御の仕組み

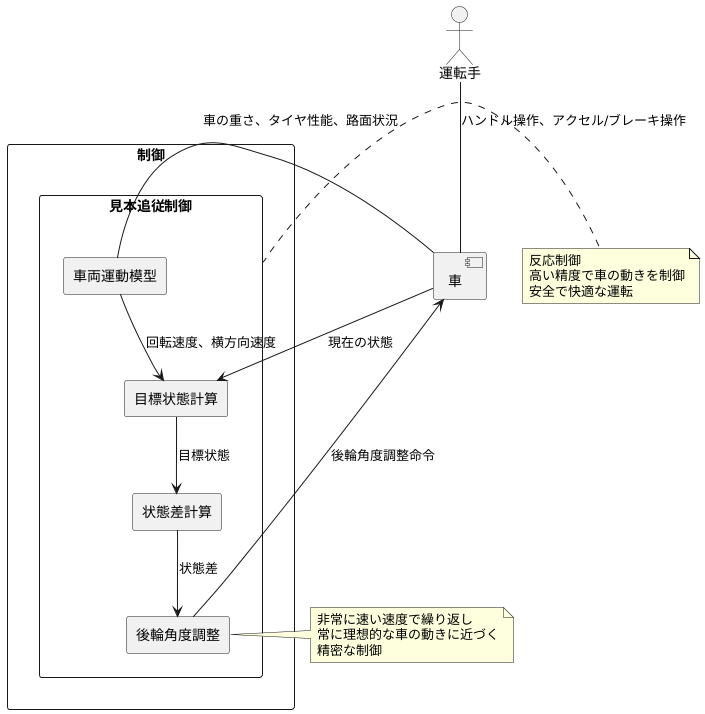
車を操る時、思い描いた通りに動くようにするには、「制御」という仕組みが欠かせません。この制御の中でも、「見本追従制御」と呼ばれる方法について詳しく見ていきましょう。
まず、運転手がハンドルを切ったり、アクセルやブレーキを踏んだりした時の車の動きを予測する必要があります。そのためには、車の重さやタイヤの性能、路面の状況など様々な要素を考慮して、「車両運動模型」と呼ばれる車の動きの設計図を作ります。この設計図は、まるで車の未来の動きを映し出す水晶玉のようなものです。
次に、この設計図に基づいて、車がどれくらい回転しているかを示す「回転速度」や、車が横にどれくらいの速さで動いているかを示す「横方向速度」といった、目標とする車の状態を計算します。
そして、現在の車の状態と目標とする状態の差を縮めるために、後輪の角度を調整します。例えば、車が目標よりも回転速度が小さい場合は、後輪の角度を調整することで回転速度を大きくします。逆に、回転速度が大きい場合は、後輪の角度を調整することで回転速度を小さくします。
この一連の動作を非常に速い速度で繰り返し行うことで、常に理想的な車の動きに近づけるように制御を行います。まるで、熟練した職人が微妙な手の動きで作品を作り上げていくように、精密な制御によって車が思い通りに動くようになるのです。
この見本追従制御は、「反応制御」と呼ばれる制御の一種です。現在の状態を常に監視しながら後輪の角度を調整することで、高い精度で車の動きを制御することが可能になります。これにより、安全で快適な運転を実現できるのです。
優れた走行性能

この車は、優れた走行性能を実現するために、先進の制御方式であるモデル追従制御を取り入れています。この制御方式は、あらかじめ設定された理想の車の動きをモデルとして、実際の車の動きがそのモデルに限りなく近づくように制御するものです。
具体的には、ハンドル操作に合わせて前輪の角度が変化すると、コンピューターが瞬時に最適な後輪の角度を計算し、自動的に調整します。これにより、二つの大きな利点が生まれます。一つ目は、狙った走行線を正確になぞる能力、いわゆる「線路追従性」の向上です。まるで線路の上を走る電車のように、ドライバーが意図した通りの経路を正確に走行することができます。例えば、高速道路で車線変更をする際も、スムーズで安定した動きを実現します。
二つ目は、横風や路面の凹凸といった外乱に対する復元力の向上です。外乱によって車が本来の走行位置からずれても、モデル追従制御が後輪の角度を細かく調整することで、素早く元の走行状態に戻ることができます。これは、まるで船が波を受けてもバランスを保つように、車の安定性を飛躍的に高めることを意味します。
例えば、高速走行中に強い横風を受けた場合でも、この制御が作動することで、ドライバーはハンドルを取られるような不安定な挙動を感じることなく、安全に運転を続けることができます。また、滑りやすい路面で急ハンドルを切った場合でも、車がスピンしたり、制御を失ったりする危険性を抑え、安定した走行を維持することができます。このように、モデル追従制御は様々な状況下で高い走行安定性と快適な運転を提供する、重要な技術です。
| モデル追従制御のメリット | 説明 | 具体例 |
|---|---|---|
| 線路追従性の向上 | 狙った走行線を正確になぞる。前輪の角度変化に合わせて後輪の角度を最適化。 | 高速道路でのスムーズな車線変更 |
| 外乱に対する復元力の向上 | 横風や路面の凹凸などの外乱から素早く元の走行状態に戻す。後輪の角度を細かく調整し、車の安定性を高める。 | 強風時の安定した走行、滑りやすい路面での急ハンドル時の安定性維持 |
様々な路面状況への対応

車の操縦安定性を高める技術として、様々な路面状況に対応できる後輪操舵システムが注目を集めています。このシステムは、路面の状況に合わせて後輪の向きを自動調整することで、安定した走行を実現するものです。
乾いた路面では、後輪を前輪と同じ向きに切ることで、車線変更やカーブでのスムーズな動きを可能にします。まるで糸を通すように滑らかに、思い通りの経路をたどることができます。一方、雨で路面が濡れて滑りやすくなった場合は、後輪の向きを調整することで、スピンといった危険な挙動を抑えることができます。急なハンドル操作やブレーキ操作を行っても、車が安定して走り続けられるよう制御することで、安全性を確保します。
雪道のようにタイヤの agarre が低下しやすい状況では、後輪操舵の役割はさらに重要になります。雪や氷の上では、タイヤが路面をしっかりと捉えにくいため、車は不安定になりがちです。このような状況下では、後輪の向きを細かく制御することで、グリップ力を高め、安定した走行を維持することができます。まるで路面に吸い付くように、しっかりと車を制御し、安全な運転を支援します。
このように、後輪操舵システムは、路面の状況に合わせて後輪の角度を自動で調整することで、乾燥路面、濡れた路面、雪道など、あらゆる路面状況で高い走行性能と安全性を発揮します。まるで熟練の運転手が運転しているかのように、様々な状況に適切に対応し、快適で安全なドライブをサポートする、まさに次世代の運転支援技術と言えるでしょう。
| 路面状況 | 後輪操舵の動作 | 効果 |
|---|---|---|
| 乾いた路面 | 前輪と同じ向き | 車線変更やカーブでのスムーズな動き |
| 濡れた路面 | 向きを調整 | スピンなどの危険な挙動を抑える、安定した走行 |
| 雪道 | 細かく制御 | グリップ力を高め、安定した走行 |
今後の発展

見込みのある制御のやり方として、模範追従制御方式というものがあります。これは、あらかじめ設定された理想的な動きを模範として、実際の車の動きがそれに合うように制御するものです。このやり方は、既に高い水準の制御を実現していますが、これからもっと進化していくと期待されています。
まず、色々なものを測る技術が進歩すると、車の状態をより詳しく知ることができるようになります。例えば、タイヤの角度や地面との摩擦の具合などが正確にわかれば、より精密な制御ができるようになるでしょう。
また、制御の方法そのものをもっと良くすることで、複雑な状況にもうまく対応できるようになります。例えば、急に人が飛び出してきたり、路面が凍っていたりする場合でも、安全に車を制御できるようになるでしょう。これは、人の手を借りずに車が自分で走る技術にも役立つと考えられています。
将来は、路面の状況や周りの車の動きなどをまとめて判断して、後ろのタイヤの向きを自動的に変えることで、より安全で快適な運転ができるようになるでしょう。例えば、カーブを曲がるときに、前のタイヤだけでなく後ろのタイヤも一緒に動かすことで、スムーズに曲がることができるようになります。
さらに、人のように考えることができる機械の技術と組み合わせることで、運転する人の癖を覚えて、その人に合った制御をすることも考えられます。例えば、アクセルの踏み方やブレーキのかけ方を学習することで、その人に合った加速や減速ができるようになるでしょう。
このように、模範追従制御方式は、これからの車の技術の進歩にとって大切な役割を果たしていくと考えられています。
| 模範追従制御方式の進化 | 詳細 | 効果 |
|---|---|---|
| 計測技術の向上 | タイヤの角度、地面との摩擦など、車の状態を詳細に把握 | より精密な制御 |
| 制御方法の改善 | 複雑な状況(人飛び出し、凍結路面など)への対応 | 安全性の向上、自動運転技術への貢献 |
| 状況判断に基づく後輪操舵 | 路面状況、周辺車両の動きを判断し後輪の向きを自動調整 | 安全で快適な運転 |
| 運転者適応制御 | AI技術により運転者の癖を学習し、制御を最適化 | 個人に合わせた加速・減速 |